2025
|
Image
|
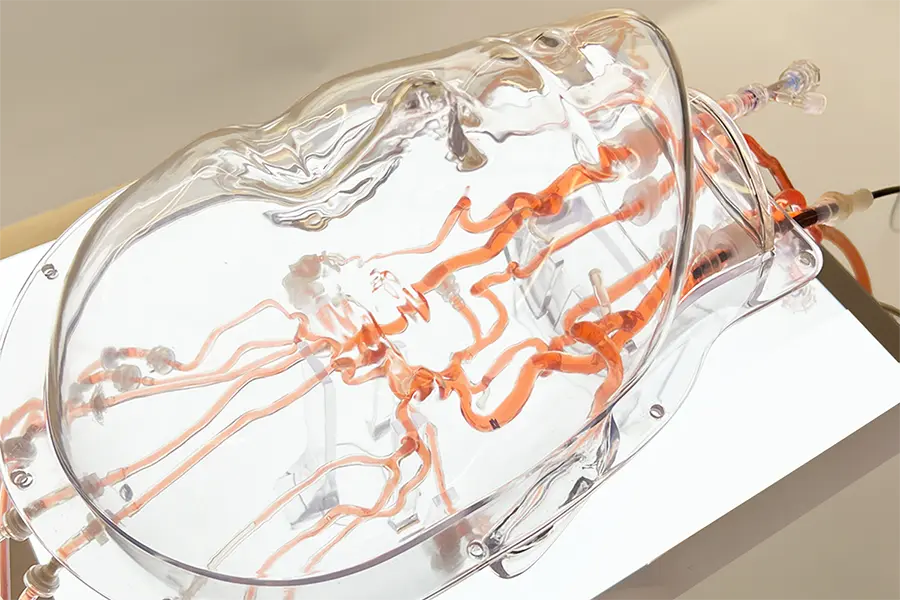
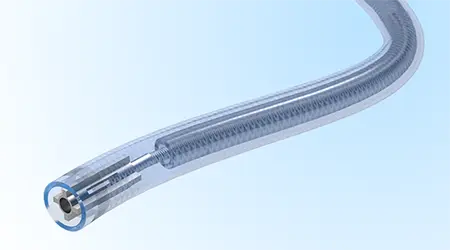
Wu, S.,1 Chang, Y.,1 Leanza, S.,1 Sim, J., Lu, L., Li, Q., Stone, D., & Zhao, R. R. (2025). Magnetic Milli-spinner for Robotic Endovascular Surgery. Advanced Materials, e08180. ▶ HighlightsWe develop the milli-spinner thrombectomy, which uses a simple yet innovative mechanics concept to modify the clot’s microstructure, facilitating its removal. The milli-spinner works by mechanically densifying the clot’s fibrin network and releasing red blood cells through spinning-induced compression and shear forces. It can shrink the clot volume by 95% for easy and fast removal. In vitro tests in pulmonary and cerebral artery flow models and in vivo experiments in swine models demonstrate that the milli-spinner achieves ultrafast clot debulking and high-fidelity revascularization, outperforming aspiration thrombectomy. |
|
Image
|
Chang, Y., Wu, S., Li, Q., Pulli, B., Salmi, D., Yock, P., … & Zhao, R. R. (2025). Milli-spinner thrombectomy. Nature, 642(8067), 336–342. ▶ HighlightsWe develop the milli-spinner thrombectomy, which uses a simple yet innovative mechanics concept to modify the clot’s microstructure, facilitating its removal. The milli-spinner works by mechanically densifying the clot’s fibrin network and releasing red blood cells through spinning-induced compression and shear forces. It can shrink the clot volume by 95% for easy and fast removal. In vitro tests in pulmonary and cerebral artery flow models and in vivo experiments in swine models demonstrate that the milli-spinner achieves ultrafast clot debulking and high-fidelity revascularization, outperforming aspiration thrombectomy. |
2024 and before
|
Image

|
Lu, L., Wu, S., & Zhao, R. R. (2024). Mechanics of magnetic-shape memory polymers. Journal of the Mechanics and Physics of Solids, 190, 105742. |
|
Image
|
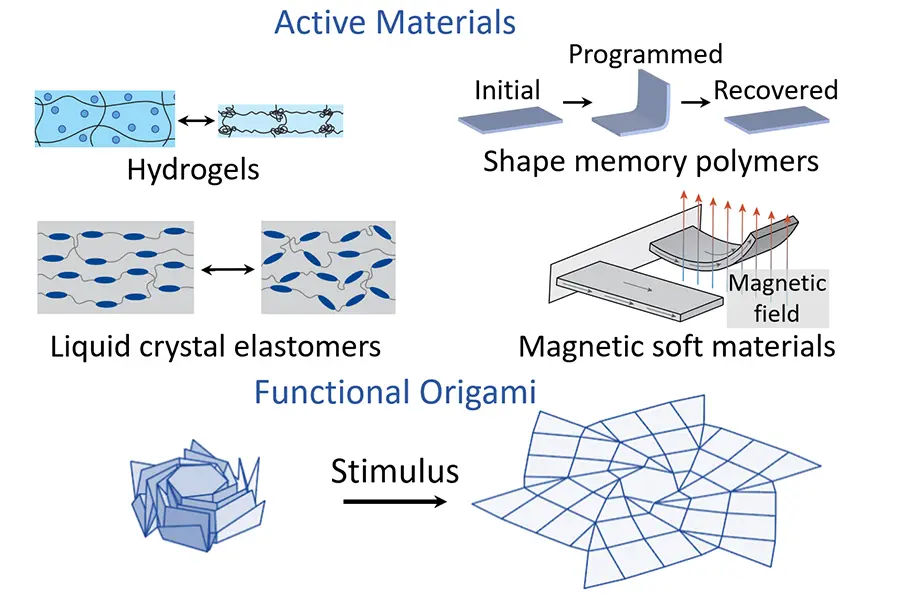
Leanza, S., Wu, S., Sun, X., Qi, H. J., & Zhao, R. R. (2024). Active materials for functional origami. Advanced Materials, 36(9), 2302066.
|
|
Image
|
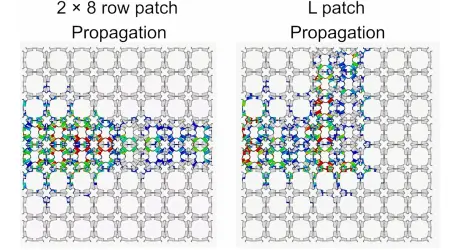
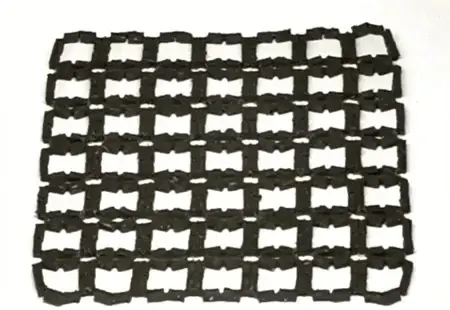
Sim, J., Wu, S., Dai, J., & Zhao, R. R. (2023). Magneto‐Mechanical Bilayer Metamaterial with Global Area‐Preserving Density Tunability for Acoustic Wave Regulation. Advanced Materials, 35(35), 2303541. ▶ HighlightsThis work present a novel magneto-mechanical metamaterial that employs a double-layer design to change area density while preserving the overall area for good conformability during actuation. Magnetic actuation facilitates rapid and reversible structural deformation between multiple modes. This allows for the metamaterial to control the propagation of in-plane elastic waves of different frequencies. Image

|
|
Image
|
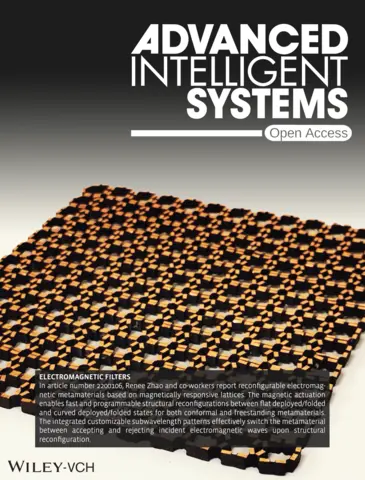
Wu, S.,1 Eichenberger, J.,1 Dai, J.,1 Chang, Y., Ghalichechian, N., & Zhao, R. R. (2022). Magnetically actuated reconfigurable metamaterials as conformal electromagnetic filters. Advanced Intelligent Systems, 4(9), 2200106. ▶ HighlightsStructurally reconfigurable electromagnetic metamaterials are developed based on magnetically responsive lattices. The structures demonstrate programmable shape morphing between flat deployed, flat folded, curved deployed, and curved folded states upon magnetic actuation. With attached customizable subwavelength units, electromagnetic metamaterials are demonstrated to switch between accepting and rejecting an incident wave by structural reconfiguration. Image
|
|
Image
|
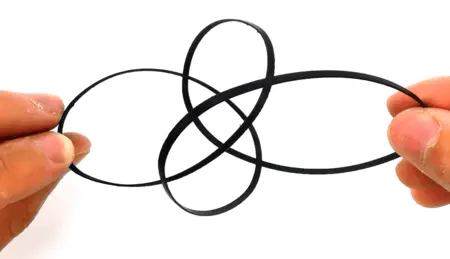
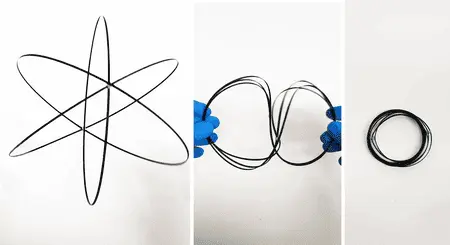
Wu, S.,1 Dai, J.,1 Leanza, S.,1 & Zhao, R. R. (2022). Hexagonal ring origami—Snap-folding with large packing ratio. Extreme Mechanics Letters, 53, 101713. ▶ HighlightsIn this work, we report a snap-folding strategy for hexagonal rings, which results in a folded state with only 11% of the initial area. Through finite element analysis and experimental validation, the influence of geometric parameters, loading methods, and loading locations on the hexagonal rings’ foldability and stability is investigated systematically. Triggered by buckling instability under bending or twisting, hexagonal rings demonstrate precise and self-guided folding with high flexibility and a high tolerance to loading fluctuations. |
|
Image

|
Ze, Q.,1 Wu, S.,1 Dai, J., Leanza, S., Ikeda, G., Yang, P. C., ... & Zhao, R. R. (2022). Spinning-enabled wireless amphibious origami millirobot. Nature communications, 13(1), 3118. |
|
Image

|
Ze, Q.,1 Wu, S.,1 Nishikawa, J., Dai, J., Sun, Y., Leanza, S., ... & Zhao, R. R. (2022). Soft robotic origami crawler. Science Advances, 8(13), eabm7834. |
|
Image
|
Wu, S.,1 Ze, Q.,1 Dai, J., Udipi, N., Paulino, G. H., & Zhao, R. (2021). Stretchable origami robotic arm with omnidirectional bending and twisting. Proceedings of the National Academy of Sciences, 118(36), e2110023118. ▶ HighlightsThe octopus quickly reconfigures its arms to perform highly integrated tasks, such as swimming, walking, and preying. Inspired by such a soft-bodied cephalopod biosystem, we engineer compliant origami robotic arms to achieve multimodal deformations that integrate stretching, folding, omnidirectional bending, and twisting for functions such as grasping and lifting objects by means of precise magnetic actuation. The remote magnetic field control allows distributed actuation of the multiple degree-of-freedom robotic system for complex motions to achieve the aforementioned shapechanging capabilities and functionalities. Origami robotic arms with untethered control are applicable to biomedical devices and morphing mechanisms in environments with limited access. Image

|
|
Image
|
Wu, S.,1 Yue, L.,1 Jin, Y.,1 Sun, X., Zemelka, C., Qi, H. J., & Zhao, R. (2021). Ring Origami: Snap‐Folding of Rings with Different Geometries. Advanced Intelligent Systems, 3(9), 2100107.
|
|
Image
|
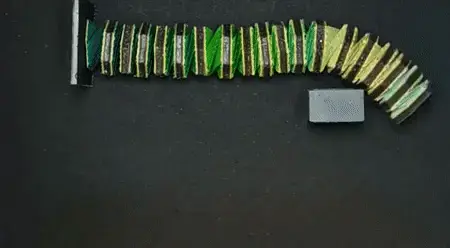
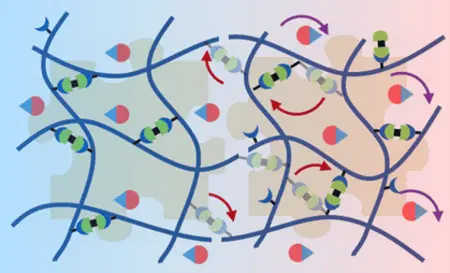
Kuang, X.,1 Wu, S.,1 Ze, Q.,1 Yue, L., Jin, Y., Montgomery, S. M., ... & Zhao, R. (2021). Magnetic dynamic polymers for modular assembling and reconfigurable morphing architectures. Advanced Materials, 33(30), 2102113.
▶ HighlightsThis work report a novel magnetic dynamic polymer that consists of hard-magnetic microparticles in a dynamic polymer network with thermally responsive reversible linkages. The polymer integrates functions including magnetic-driven navigating, assembling, welding, morphing, reprogramming, and structural reconfiguration, providing a new paradigm for reprogrammable morphing architectures and devices. Image

|
|
Image
|
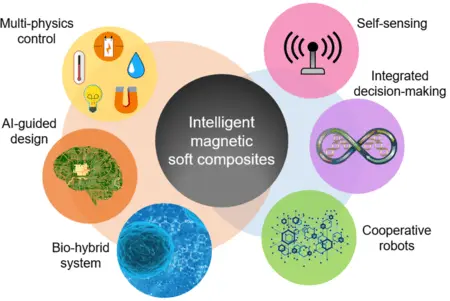
Wu, S., Hu, W., Ze, Q., Sitti, M., & Zhao, R. (2020). Multifunctional magnetic soft composites: A review. Multifunctional materials, 3(4), 042003. |
|
Image

|
Wu, S., Hamel, C. M., Ze, Q., Yang, F., Qi, H. J., & Zhao, R. (2020). Evolutionary algorithm‐guided voxel‐encoding printing of functional hard‐magnetic soft active materials. Advanced Intelligent Systems, 2(8), 2000060. |
|
Image

|
Ze, Q.,1 Kuang, X.,1 Wu, S.,1 Wong, J., Montgomery, S. M., Zhang, R., ... & Zhao, R. (2020). Magnetic shape memory polymers with integrated multifunctional shape manipulation. Advanced Materials, 32(4), 1906657.
▶ HighlightsThis work present a novel magnetic shape memory polymer that uses the embedded magnetic particles to regulate the material stiffness and induce actuation. This enables integrated shape-manipulation functions, including untethered rapid reversible shape change, sequential actuation, shape locking, and reprogrammability. The integrated functions permit applications such as soft grippers with large grabbing force, morphing electronics, and minimally invasive biomedical devices. Image

|
|
Image
|
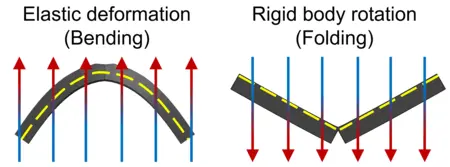
Wu, S.,1 Ze, Q.,1 Zhang, R., Hu, N., Cheng, Y., Yang, F., & Zhao, R. (2019). Symmetry-breaking actuation mechanism for soft robotics and active metamaterials. ACS applied materials & interfaces, 11(44), 41649-41658.
▶ HighlightsWe exploit a new class of programmable magnetic-responsive composites incorporated with a multifunctional joint design that allows asymmetric multimodal actuation under an external stimulation. We demonstrate that the proposed asymmetric multimodal actuation enables a plethora of novel applications ranging from the basic one-dimensional/two-dimensional (2D) active structures with asymmetric shape-shifting to biomimetic crawling robots, swimming robots with efficient dynamic performance, and 2D metamaterials with tunable properties. Image
|